
[강화학습] Markov Decision Process
2. Markov Decision Process
1. Markov Processes
- Markov decision processes는 강화학습에서 evironment를 describe하며, 이때 environment는 fully observable 되는 상황으로 가정함
- current state가 the process를 완전히 characterises함
- 대부분의 RL 문제는 MDP로 공식화가 가능함(partially observable 문제도 MDP로 전환 가능)
2. Markov Property
Markov property
- 현재가 주어졌을 때 미래는 과거에 independent함
-
S(1)~S(t)를 아는 것과 S(t)만 아는 것은 동일함
### State Transition Matrix
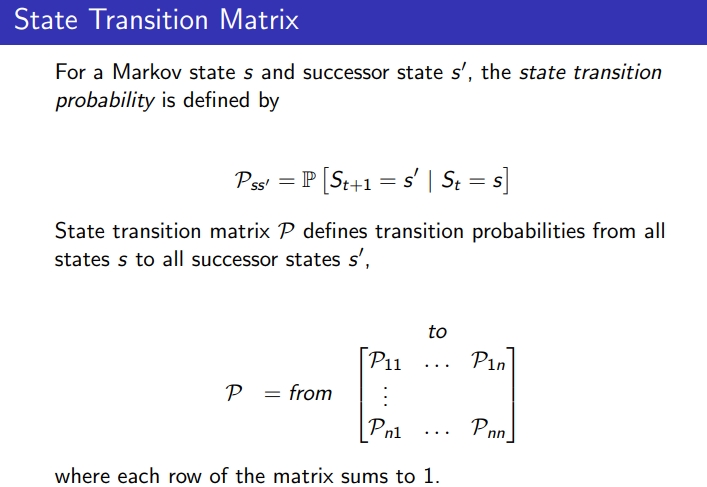
- state s와 다음에 오는 state s’의 state transition probability는 P(ss’)로 정의되고,
- state transition matrix P는 s → s’의 transition probabilities를 정의함
Markov Process
- 현재의 state만을 가지고 random process(확률적으로 시간 흐름에 따라 변화하는 구조)
- Markov Process = <S,P> state와 transition probabily
- S: finite set of states
- P: state transition probability matrix P(ss’)
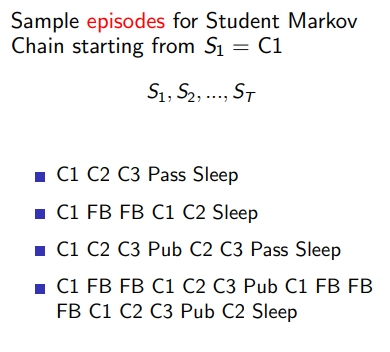
MP example : student Markov Chain Episode
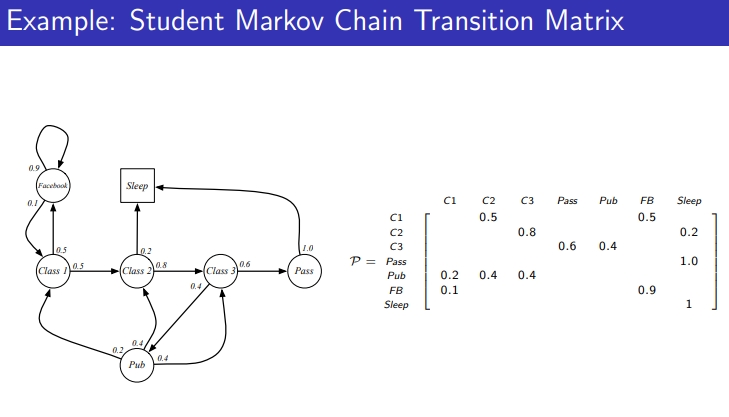
- P 행렬로 표현
3. MRP
3-1. MRP 의미
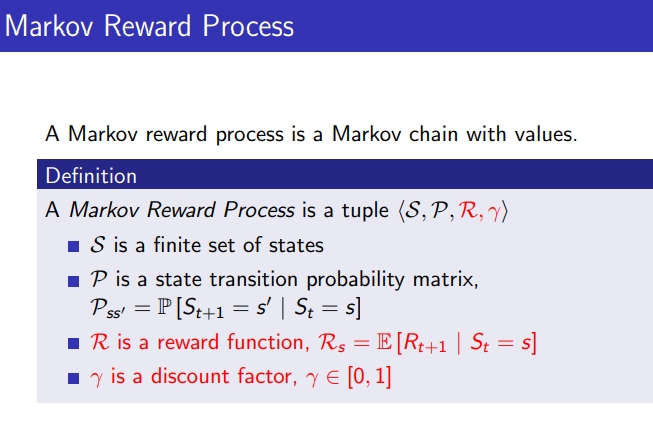
- MRP는 Markov Process에 reward가 추가된 것
- MRP = <S,P,R,Γ>
- S: finite set of states
- P: state transition probability matrix P(ss’)
- R: reward funtion
- Γ: discount factor
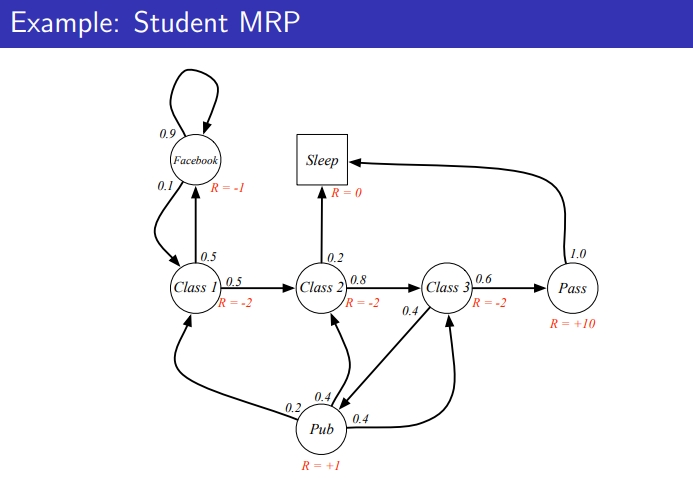
MRP example : student Markov Chain Episode
3-2. Return
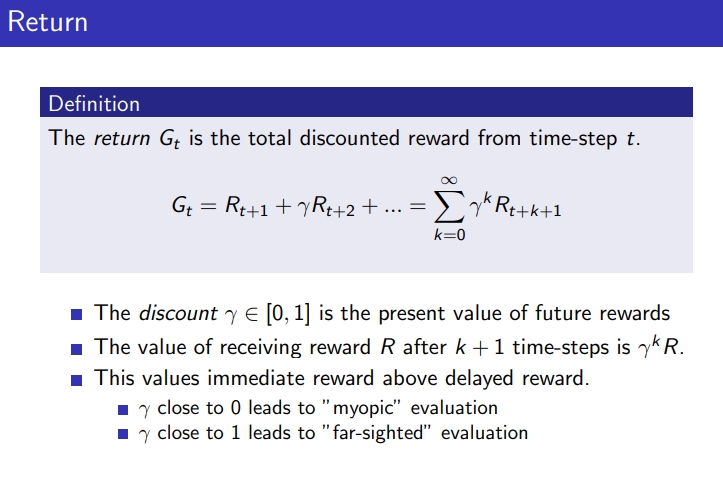
- G(t) : time stept t의 total discounted return
- discount Γ: future rewards의 present value(t+2부터 discount factor을 곱함 Γ,Γ^2, Γ^3 ,… )
- Γ 0에 가까운 경우, 근시안적으로 지금의 state만을 중요시 여기는 평가 진행
-
Γ 1에 가까우면 장기적인 관점의 평가를 함
- 대부분의 Markov reward와 decision process는 discounted 되는데 이유는?
1) avoid infinite return : step이 무한하게 발생하는 경우, 무한대로 갈 수 있는데 Γ를 이용해 discount해서 반영 exponentially reward가 낮아짐
2) 미래에 대한 불확실성이 fully represented되지않음
3) 현재 리워드에 더 가중치를 줌
- discount되지 않은 Γ=1인 경우도 있는데 toy example인 경우 1 가능
3-3. Value fucntion
- MRP의 Value function V(s) : state s에서 시작한 expected return
Example: Student MRP return
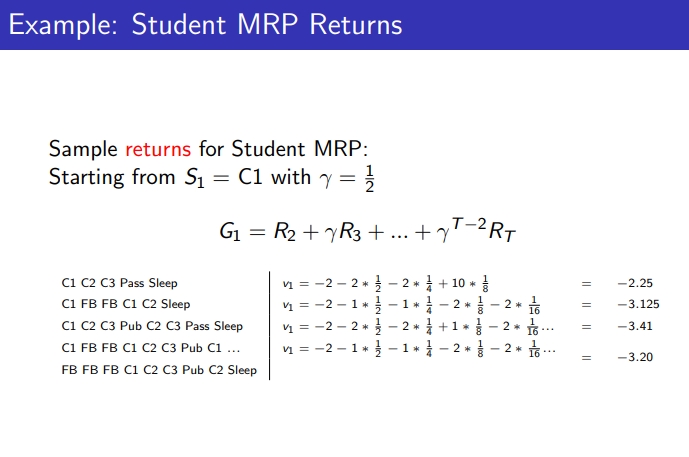
- r에 따라 value function은 달라짐
3-4. Bellman Equation
Bellman equation for MRPs
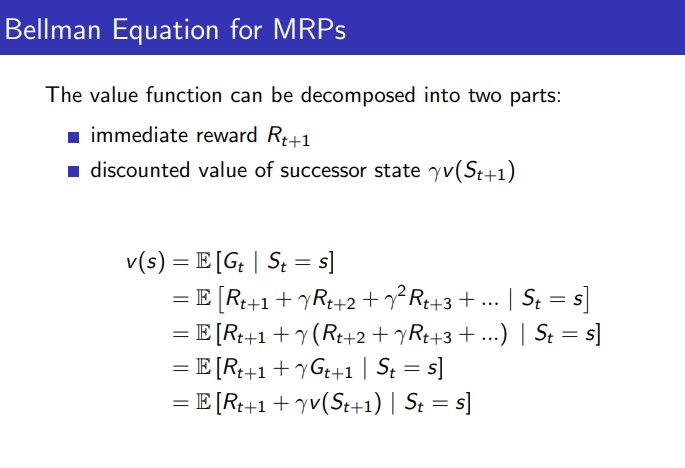
- Value funtion은 1) immediate reward R(t+1) 2) discounted value of successor state ΓV(S(t+1))으로 구성됨
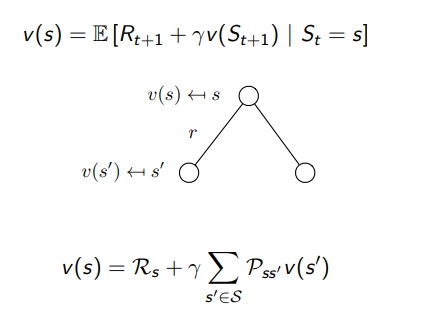
- v(s) = 즉각적인 리워드 + next state의 value fuction
- v(s’)에 transition probabilty를 곱해줌
Example: Bellman Equation for Student MRP
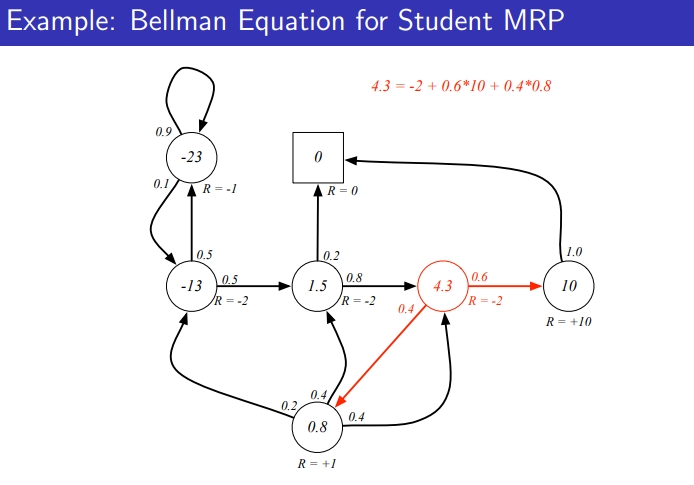
- v(s) 4.3 = -2 (즉각 리워드) + 0.6 * 10 + 0.4 + 0.4*0.8
- 모든 transition probabilty와 value function 곱해줌
- value function이 서로를 구하는데 영향을 계속 해서 주는데 이를 계속 반복하면 value function이 수렴하게 됨
요약: Bellman Equation은 즉각 리워드 + transition probabilty * 연결된 value function
Bellman Equation in Matrix Form
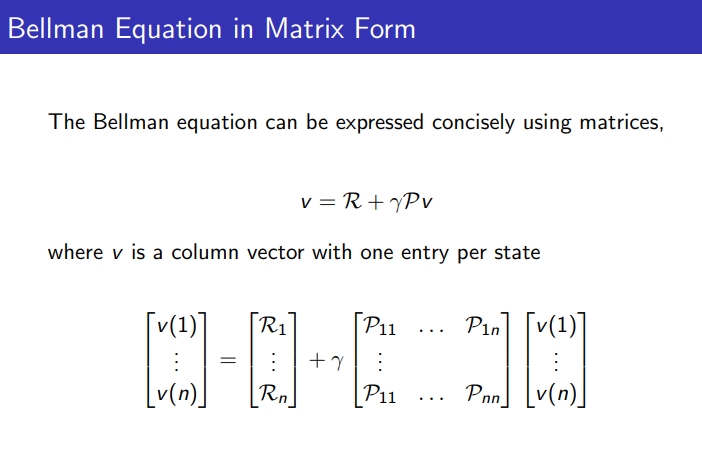
Solving the Bellman Equation
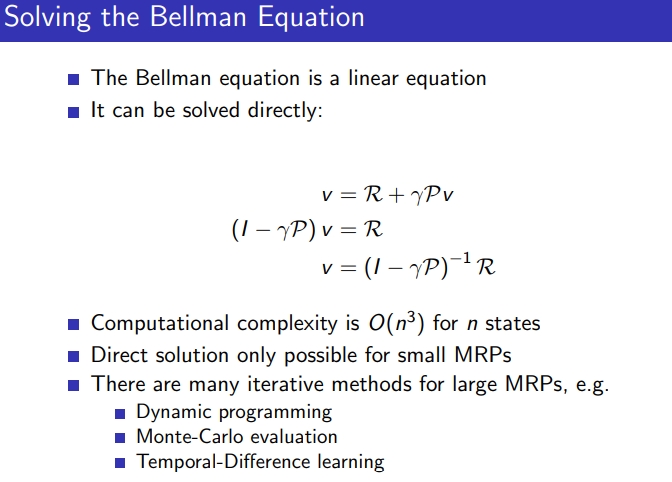
- n이 커지면 계산에 어려움이 있어서 MRP가 커지면 다이렉트하게 풀기보단 다이나믹 프로그래밍을 사용
4. Markov Decision Process
4-1. Markov Decision Process
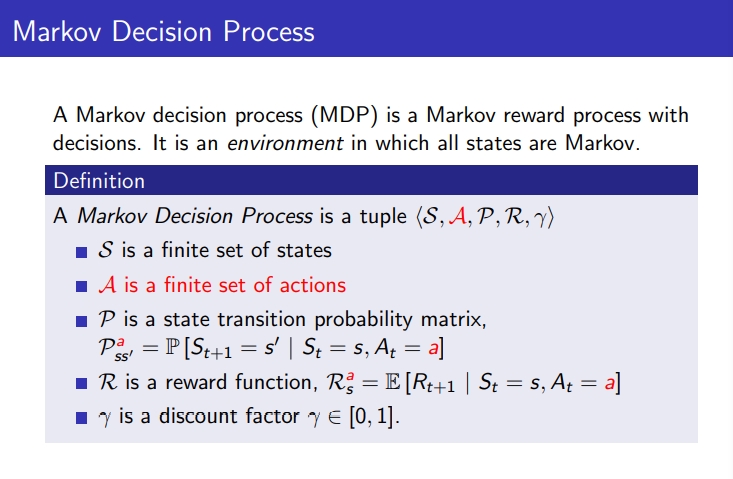
- MDP는 MRP에 action 정보까지 들어간 것
- MDP = <S,A,P,R,Γ>
- S: finite set of states
- P: state transition probability matrix P(ss’)
- R: reward funtion
- Γ: discount factor
- A: finite set of actions
- P(a,ss’) : 어떤 Action을 했을 때, 어떤 State로 가는지 transition probability
- R(a,s) : 어떤 Action을 했을 때 어떤 Reward가 생기는지
Example: Student MDP
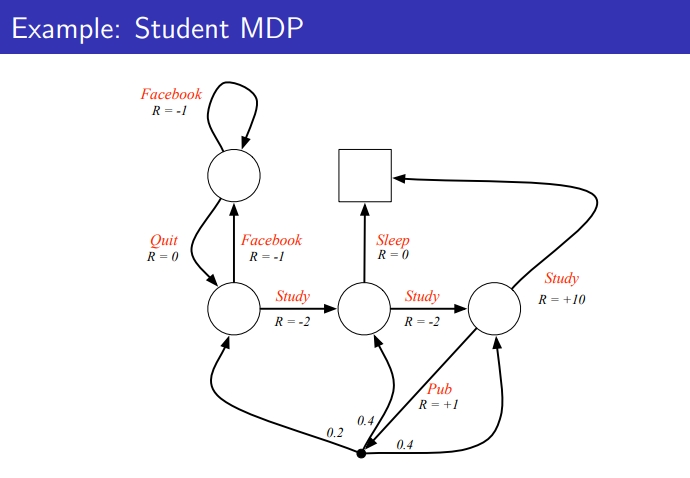
- MRP는 state에 도달하면 그 state에 대한 Reward가 주워짐
- MDP는 특정 Action했을 때 도달하고 Reward가 주워짐
4-2 policies
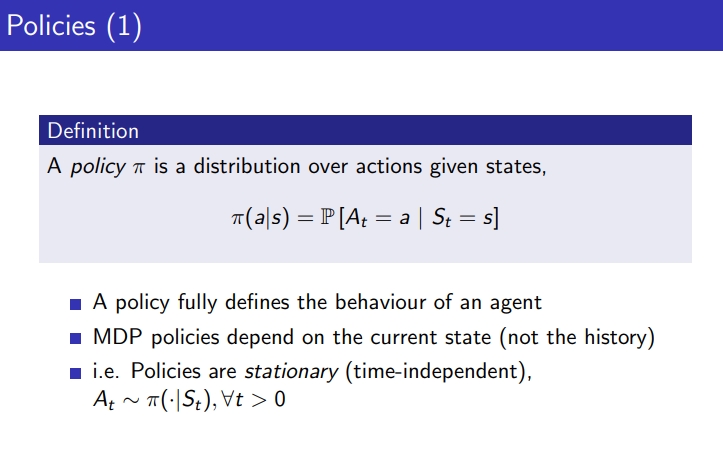
- policy: 어떤 state에서 어떤 Action을 할 확률
- policy는 agent의 behavior을 정의하고, MDP policies는 current state에 depend
-
policy는 stationary : state가 동일하다면 state에 의해 Action하는 확률도 같아야 함
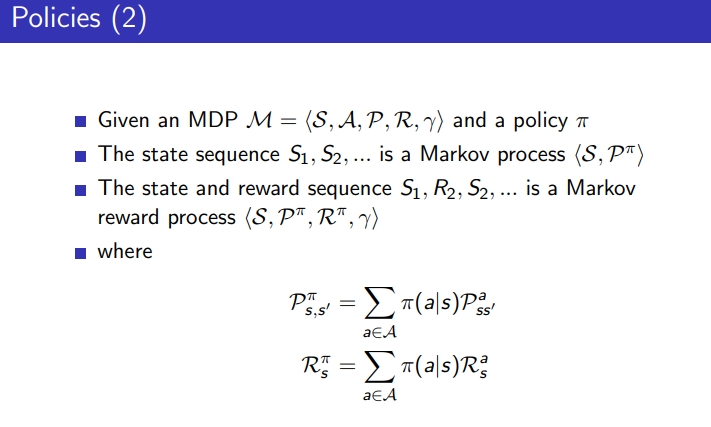
- P(π, s,s’) : 어떤 state에서 Action할 확률 * Action을 취했을 때 다른 State로 가는 transision prob. ⇒ transision prob과 policy가 맞물려서 결정됨
- R(π,s)
4-3. Value Function
- state-value : given policy π에 의해서, 주어진 State에서 끝까지 갔을 경우 return 값의 기댓값, state s에 대해 이 policy를 따르는 value 값
- action-value: given policy π에 의해서, 주어진 state에서 어떤 Action을 택했을 때 그 이후로부터 return 값의 기대값
4-4. Bellman Expectation Equation
- state value function: 즉시 발생 리워드 + 그 이후 state에서의 policy에 따른 value 값(discount)
-
action value function: 즉시 발생 리워드 + 그 이후 state에서 policy에 따라 임의의 action 선택한 value 값(discount)
### 4-5. Bellman Expectation Equation for Vπ
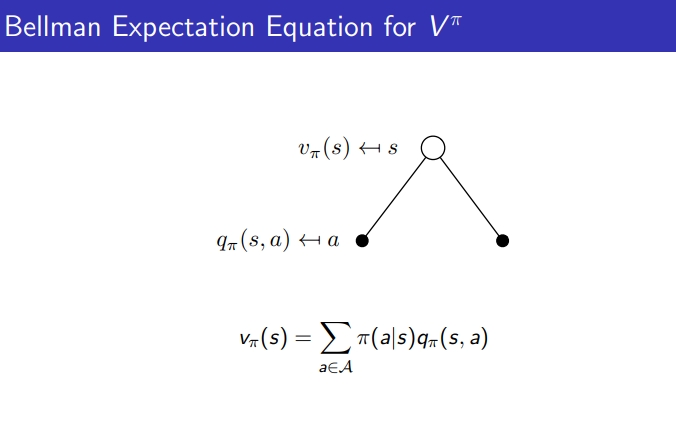
- Vπ(s) : π에 따라 Action 선택
- Qπ(s): 어떤 State에서 π에 따라 어떤 Action 선택
- value function을 policy와 q함수 조합으로 재정의
- v를 q로 표현
4-6.Bellman Expectation Equation for Qπ
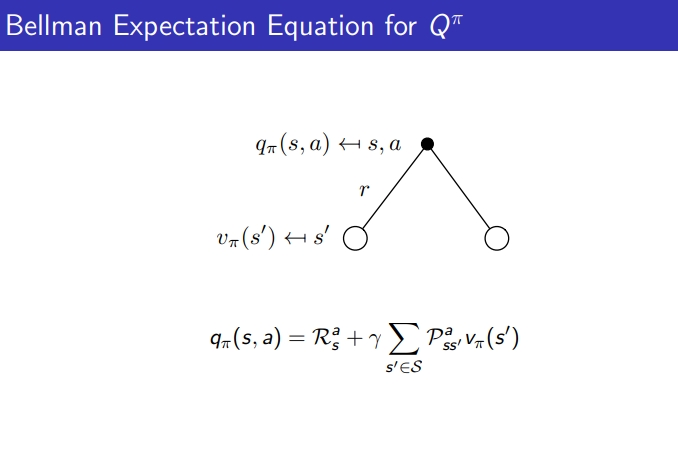
- q를 v로 표현
- qπ(s,a) = 즉각적으로 발생하는 리워드 기댓값 + 어떤 state에서 다른 state로 갈 확률 * 그 확률에 따라 그 state로 갔을 때의 value 값
References
Lecture 2: Markov Decision Processes
Leave a comment