
[강화학습] Model-based Planning
3. Model-based Planning (4강 model_based)
강의록4.model_based
1. Planning & Learning
- sequential decision making에서 2개의 fundamental problems이 있음
1-1. Planning
- Environment의 model(MDP)가 알려져 있고
- agent가 그 모델과 interaction
- agent가 policy를 improve
1-2. Learning
- envrionment을 모름
- agent가 environment와 interacts
- agent가 policy를 improve
1-3. 다이나믹 프로그래밍
- 복잡한 문제를 간단한 규모로 쪼개고 작게 만듦
- shortest path를 찾는 문제가 있다고 하면 전체 path를 모두 나열하긴 힘들기 때문에 각각의 쪼개서 각각의 short path를 구하고 원래 원했던 전체 path의 최소를 구함
- MDP는 다이나믹 프로그램밍에 필요한 요소들을 모두 만족
1-4. Planning by Dynamic Programming
- MDP에 대해 full knowlege있다고 가정
1) Prediction (evaluation)
- Input : MDP <S,A,P,R, Γ>, π
- output: value function Vπ
MDP와 policy에 따른 value function을 계산하는 것이 policy evaluation
2) Control (improvement)
- input: MDP
- output: optimal value function V* and optimal policy π*
랜덤 π에서 시작해서 그 π를 가지고 iterative하게 정정, π를 evaluation하고 그 결과로 π improve, 최종은 optimal policy & value function 구하기
2. Policy Evaluation & Policy Iteration & Improvement
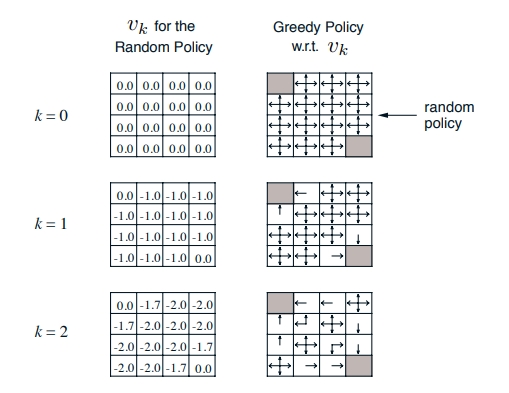
2-1. Iterative policy evaluation
- policy를 evaluate하는 방법: bellman expectation backup(iterative하게 얻어내는 걸 backup이라고 함)
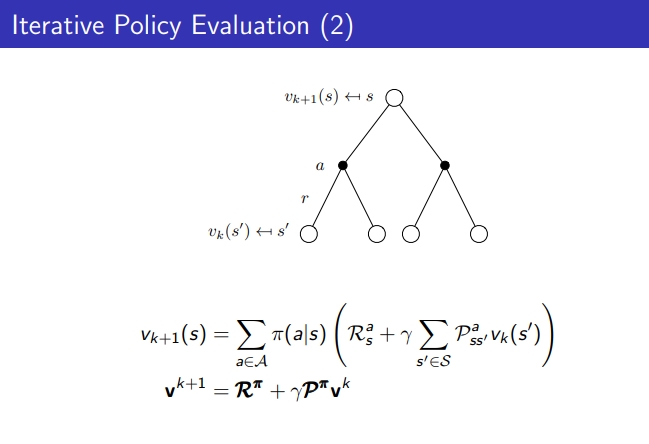
- 모든 value function을 initialize하고 Vk(s’)로 Vk+1(s)를 업데이트함(state의 value 값은 이전 값으로 만듦)
- k가 무한대로 간다면 Vπ를 따르는 value function을 구해낼 수 있다.
Example : Small Grid World
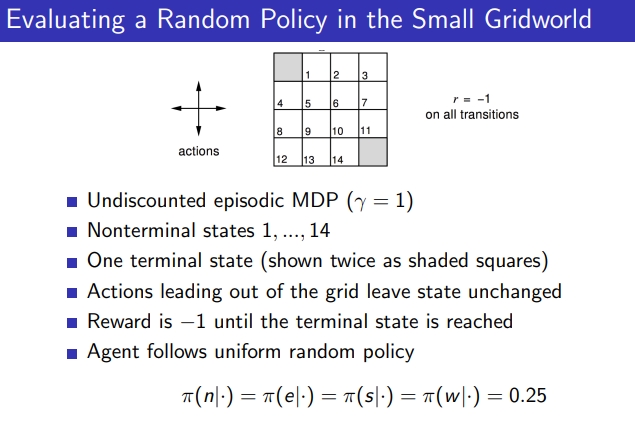
- π가 주어짐, policy의 value 값 어떻게 논할까, 0.25로 줌
- 처음에 v값을 initialize하게 0으로 줌
- 업데이트 하는 방법: 즉각 리워드 + 감마*발생할 수 있는 모든 next state value 값 *V(바로 이전 값)
- 1,2행을 구해보자면
1) UP: v(s) = 0.25 * (-1 +0) = policy * (즉각 리워드 + 이전 value 값)
2) DOWN, LEFT , RIGHT도 같은 방식으로
v(s) = 4 * 0.25 * -1
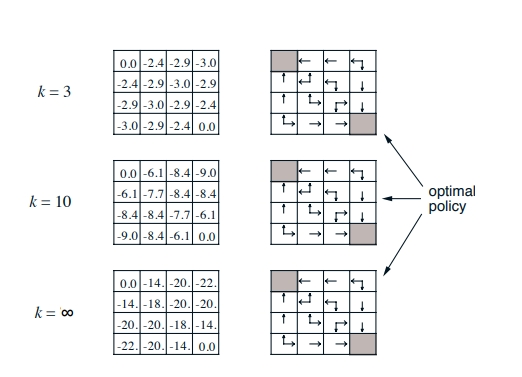
- k가 높아지면서 수렴됨
2-2. Iterative Policy Evaluation
- Input π, π는 evaluated
- 수렴하는 값에 대해 threshold θ를 줌
- V(s)를 initailze하고, 터미널 V 값을 0으로 둠
- 모든 state에 대해 현재 state의 value 값을 가지고 옴
- policy의 action마다 구하고 이전 iteration의 value값을 더 함
- V(s) 값이 갱신되는데 더 이상 변하지 않는 값이 옴, 각 state 중 가장 큰 값을 찾아 threshod와 비교
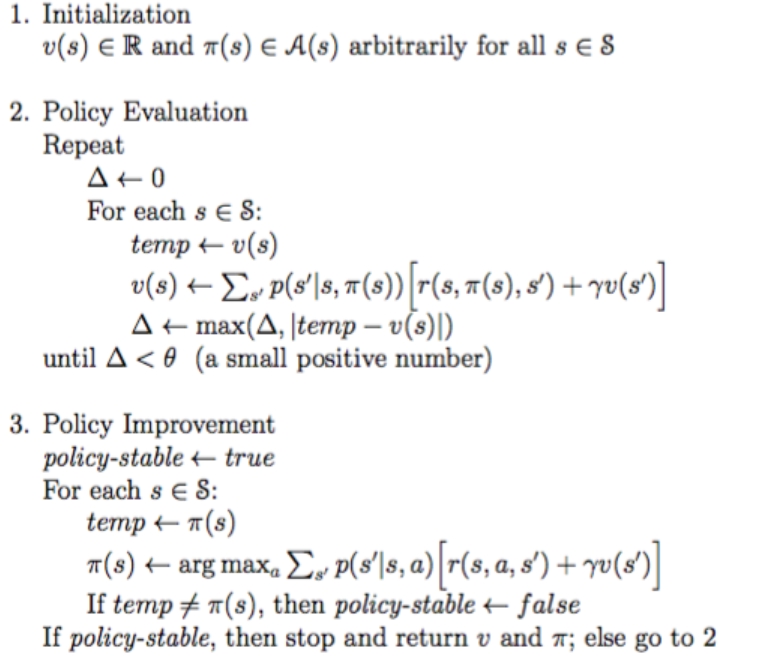
2-3. policy iteration
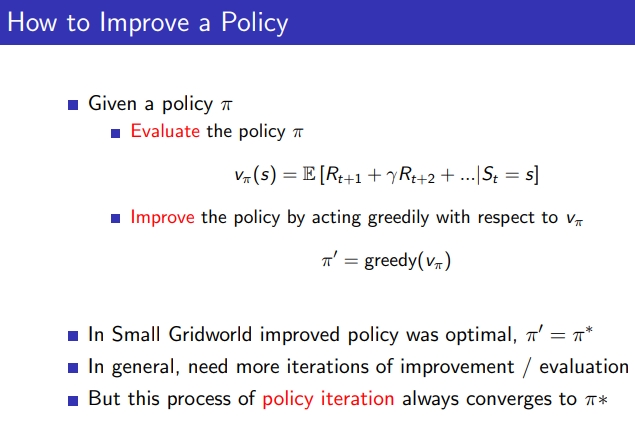
- policy evaluation과 improvement의 반복
주어진 policy에 대해
STEP1. policy를 evaluate함
STEP2. Vπ에 관해 greedy acting하면서 policy를 improve함
- Small grid world에서는 몇번 반복하면 policy가 optimal하지만 보통은 더 많은 반복이 필요함
- policy iteration은 항상 optimal policy에 도달함
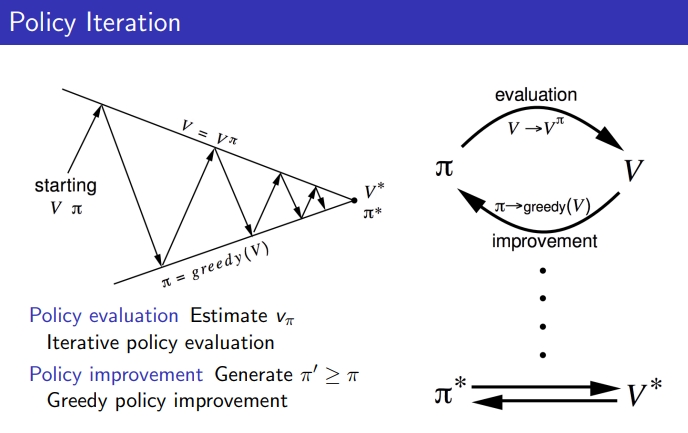
1) policy evaluation: 이 π에 대해 V가 수렴할 때까지 계속해서 evaluation함
2) Policy improvement: 수렴된 V를 가지고 policy를 update함, 그리고 새 π에 대해 수렴할 때까지 evaluation
1),2)의 과정을 반복하여 π와 V 모두 optimal한 상태가 됨
2-4. Policy Improvement
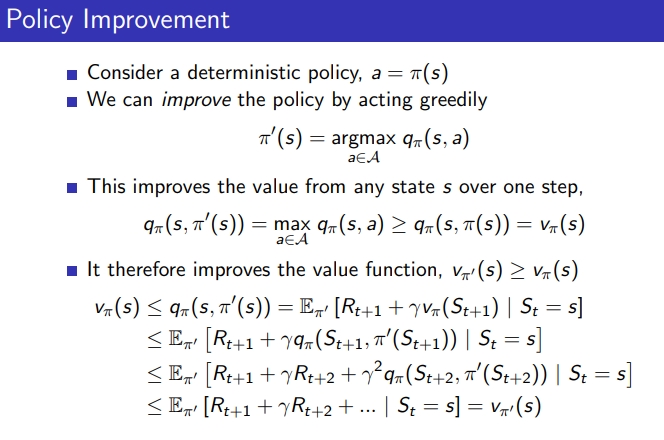
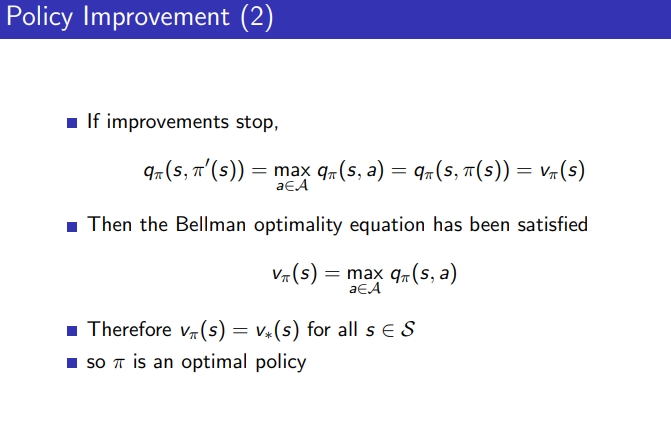
- greedy하게 improve된 policy에 의한 Q 값
- = 원래 policy로 할 수 있는 action의 max값
-
≥ 그 state에서 주어진 policy에 의해 action의 q값의 기댓값이 같아야함
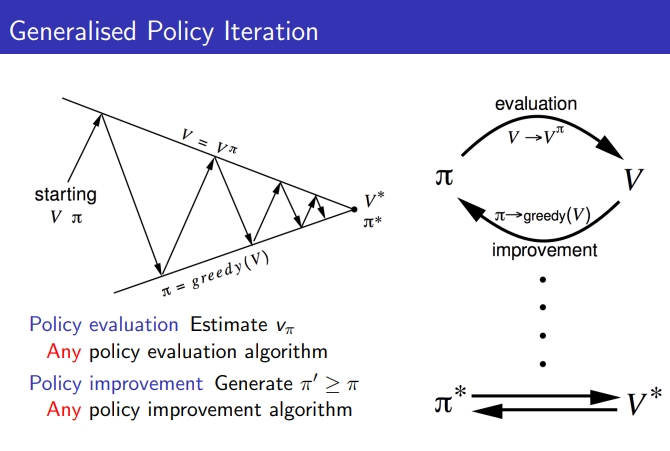
- general한 방법이 있음
1) k = ∞, greedy policy improvement 사용
2) k = 1, greedy 알고리즘 사용
1),2) 같이 사용
3. Value Iteration
3-1. Principle of Optimality
- optimal policy은 2개의 요소 나뉘어짐
1) optimal first action A
2) optimal policy from successor state S’
- S1 →(opt)→ S2 →(opt)→ S3 , S1 →(opt)→ S3도 opt을 구할 수 있다
3-2. Deterministic Value Iteration
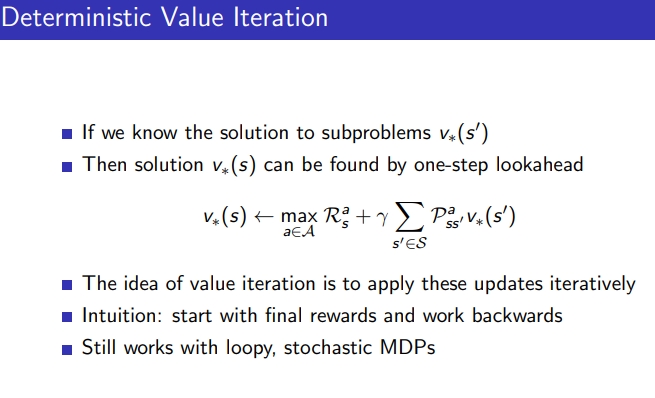
- 어떤 state에서 즉각적인 리워드 얻었을 때 next state의 optimal 값을 안다면 현재 ~ 터미널까지 optimal 값을 계산할 수 있음
3-3. Value Iteration
-
벨만 optimal 상태인 걸로 가정하고 max를 가지고 옴
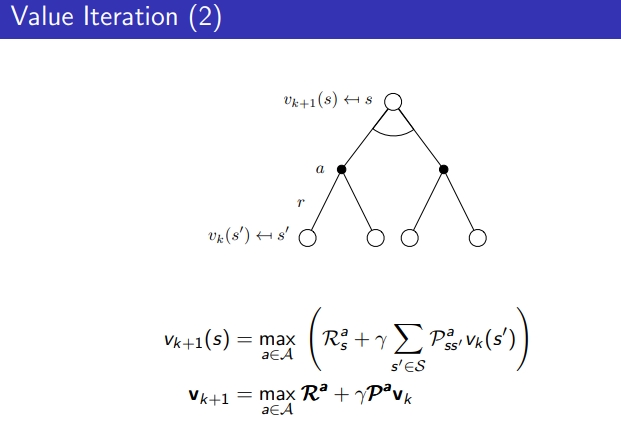
- 벨만 optimal을 K+1에 적용함 k번째 값으로부터
- policy iteration과는 다르게 evaluation과 improvement가 구분되어 있지 않음
- Action별 기댓값 중 max로 업데이트만 반영, Value값 변화 없으면 argmax 취해서 optimal policy를 얻음
4. Summary
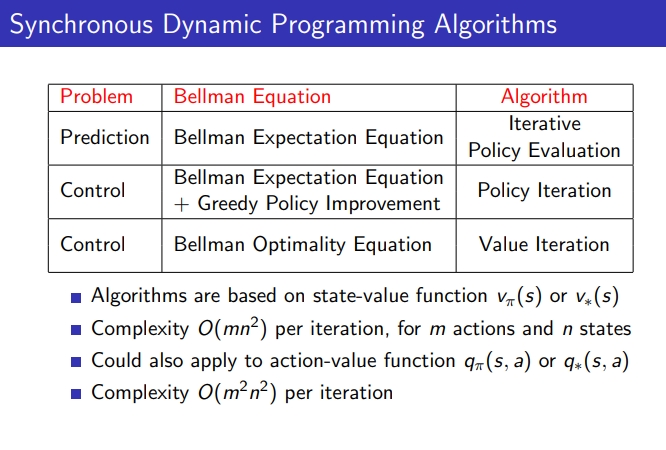
- Iterative Policy Evaluation : Bellman Expectation Equation → evaluation만 하고 싶은 경우
- Policy Iteration : Bellman Expectation Equation + Greedy Policy Improvement
- Value Iteration : Bellman Optimality Equation
과제 관련
References:
David Silver Lecture 3: Planning by Dynamic Programming
Leave a comment